前書き
お久しぶりです、産技高専荒川キャンパスロボ研の田中です。
2024年度の大会が終わったので今年の所感(お気持ち表明)と今年使っていた回路を紹介します。
なにか質問やここもっと解説しろみたいなところがあればtwitterのDMまでご連絡ください。
本サイト上の回路図はそのまま流用して問題ありません、ただし正常に動作しなかったり問題が起きても著者は責任は負いません。
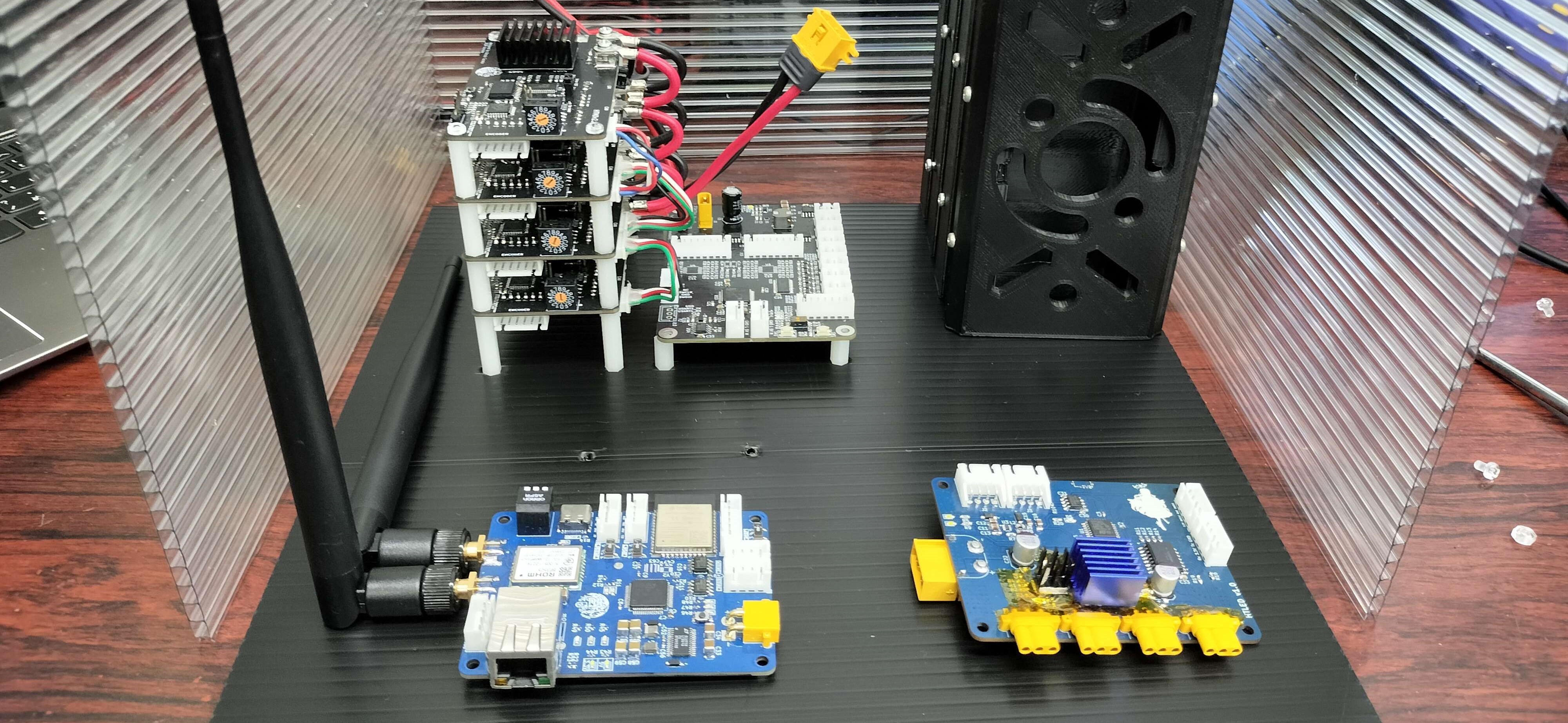
基板紹介
以下の順で紹介します。
- メイン基板
- MDその1
- MDその2
- LEDテープ基板
- YamaHexDeviceController
マザー(メイン基板)

去年のメイン基板はあまりにもゴミ回路過ぎたので作り直しました。
これから先、数年間使いまわすことができるように多機能な回路にするべく開発しました。
この基板単体で
- 920MHz(Wi-SUN fun)での通信
- CAN,CANFDでの通信×2
- Ethernetでの通信
- Wi-Fi,Bluetoothでの通信
- その他STM32で使える通信を使った外部PC、センサとの通信
以上のことができます。
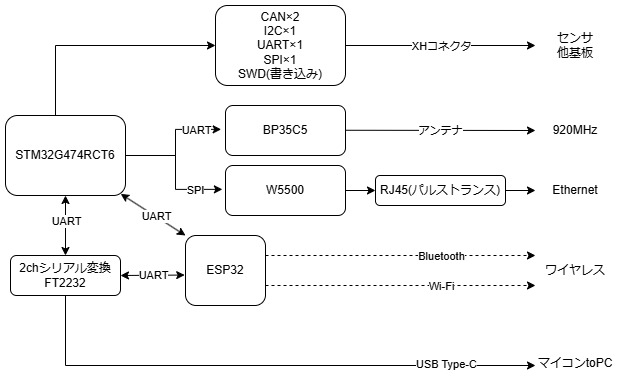
STMと各機能の接続は次のようになっています。
搭載マイコン
昨年度、開発コストが低いという理由でマイコンをSTM32からESP32に変更しましたが、あまりにもESP32がダメなマイコンということが発覚したのでSTM32に出戻りしました。
メインマイコンにSTM32G474RCT6を使っています。
このSTMはとにかく何でもできます。CANが3つ使えたり…
また、無線通信用にESP32が積んであります。積んではあるものの私がESPアンチなのもあり、単純にWi-FiとBluetoothを使うためだけの無線専用マイコンになっています。
故障率が高く不安定なマイコンなので本当は使いたくなかったのですが産技荒川はPS4のコントローラを多用していることもあり、長い目で見たときに積んでおいた方がいいと判断しました。
920MHz(Wi-SUN)
みんな大好き920MHzの通信モジュールです。
ロボコンではinterplan社が発売しているIM920を使っている高専が多いと思いますが私はあえて使いませんでした。
今回使用したのはRohmから発売されているBP35C5というモジュールです。

BP35C5はWi-SUN FANという規格に対応していてなおかつ基板に実装しやすかったので採用しました。
Wi-SUN FANはIEEE 802.15.4に属する規格です。現状、高専ロボコンには無線に関する規格の規定は存在しませんが、学生ロボコンには使用できる無線の規格に関してIEEE802.11(Wi-Fi)とIEEE802.15(LPWAN)のみを使用しなければならないというルールがあります。
もし、今後この規定が高専ロボコンにも追加されたときにも対応できるようにこのモジュールを使いました。(ロボコンの協賛企業様だったのもある)
制御担当の後輩から聞いた話によると内部のバッファに一度パケットを保持し、ある程度貯まったら一度にまとめて送信しているようで100ms単位で遅延が発生するとのことでした。
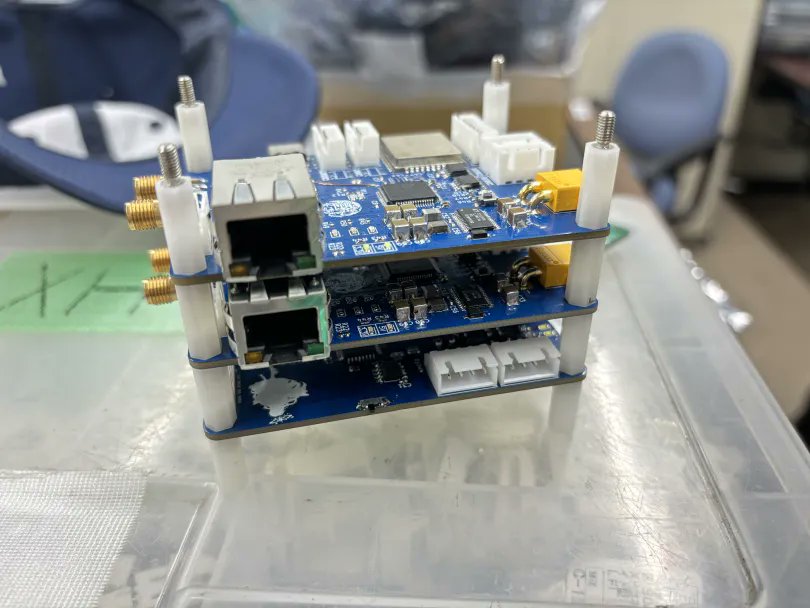
Ethernet
センサや回路が増え、処理するデータが多くなってUARTがパンクしたときや単純にEthernetが使いたくなった時のためにEthernetとRJ45コネクタを載せました。
構成としてはSTM32 ↔ W5500 ↔ RJ45という感じです。
メインマイコンのSTM32G474はイーサネットコントローラが非搭載なので外部で変換用のICを噛ませる必要があります。今回はwiznet社製のW5500を使用しました。
W5500とSTMの接続はSPIで接続しています。
ソフトウェア側に近い話になりますが、W5500はTCP/IPプロトコルスタックをハードウェアに内蔵しています。そのため自分でスタックを実装する必要がなく、開発コストが低いのが大きな利点です。同時にSTM側の負荷も軽減することができます。
開発にあたり、「即戦力モノづくりエンジニアへの道標」様のサイトを参考にさせて頂きました。こちらのリンクからご覧になってください。
RJ45周りのアートワークが大変でした。細かい指定が多くガイドラインに沿って設計するのに時間がかかりました。初回の発注ではまず動かないと思っていましたがなぜか動きました()
ただ、しっかりした設計ガイドがあるのでそれに沿って設計、配置、配線をすればしっかり動くと思います。等長配線はやってて楽しいので機会があればぜひやってみてほしいです。
モタドラその1
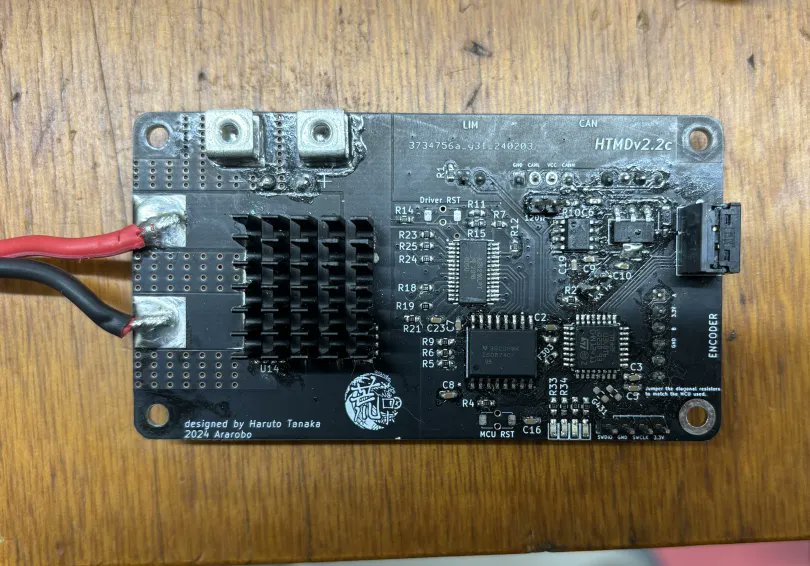
新規開発というよりはリメイクに近い基板です。去年に作ったv1.5はロジックを論理回路で分離していました。しかしロジックICの故障率の高さやはんだ付けの難易度が高いなどの問題がありました。
一から新規設計するのは気が引けたので既存の回路をベースにディスコンの部品などを置き換えて再設計しました。
ロジック部
制御用のマイコンにはSTM32F303K8T6とSTM32G431K8T6を採用しています。
既存の基板と同じものですが設計の都合上ピン配置が異なっているためFWは新規開発しています。
今年度の基板開発の大きな要件として「CANFDに対応させる」というのがありました。
部室に在庫として置いてあったSTM32F303K8T6を使い切りつつCANFDに対応させる目的でマイコンを置き換えられるように設計をしました。
上記マイコンは電源ピンの配置が多少違います。対応策としてジャンパによって電源の入力を切り替えられるように設計しました。
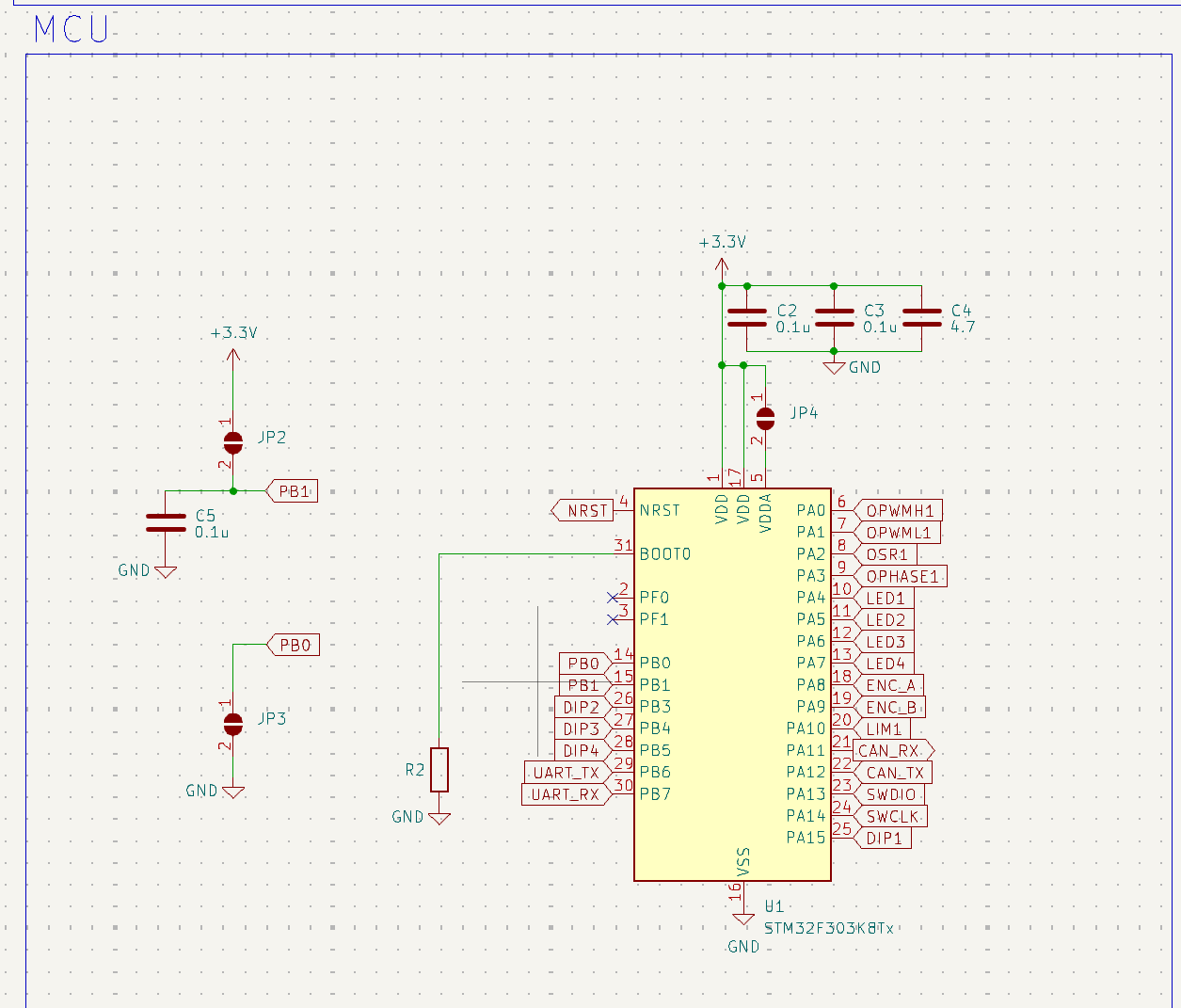
基本的にはF303の方を使い必要に応じてF431を載せてジャンパを切り替える形です。
実際にジャンパする際は金属でできた0ohm抵抗を使ってジャンパします。
駆動部
ゲートドライバにはA3921を使用しています。ロボコン界隈では一番よく見るゲートドライバだと思います。データシートの書き方に多少わかりにくいところはありますが回路を組むハードルも高くないしまとめ買いすれば単価も安いのでおすすめです。
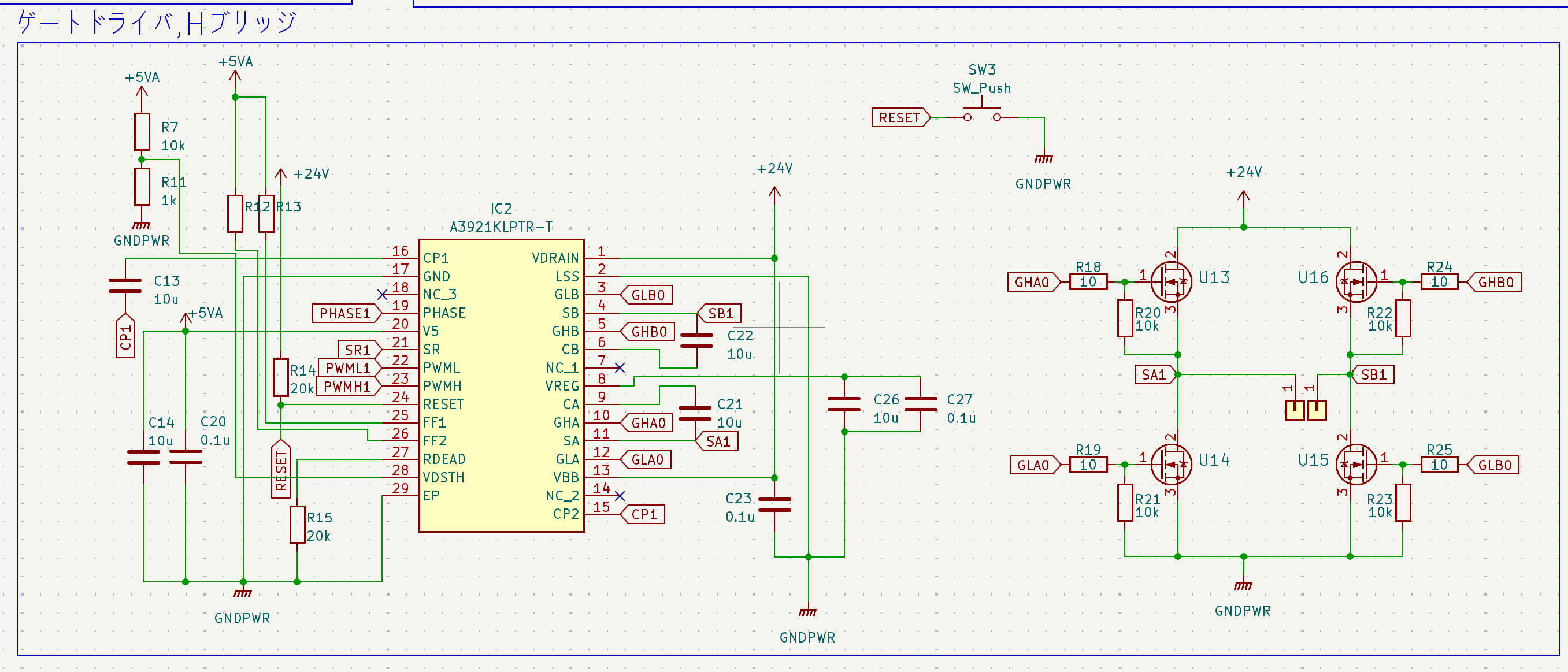
FETはRohm様とCorestaff様に提供していただいたものを使っています。
多少熱のことも考えて設計したので735をストールしても少しなら耐えられます。
その他
他にこだわった点として横向きのロータリースイッチをCAN IDセレクタとして採用しました。
このMD自体は2023年度のロボコン後に設計し交流ロボコンから使用していました。20枚近く製作して壊れたのを把握しているのは3枚くらいです。故障理由も発熱等ではなくハンダ不良が主な原因でした。
一枚はロボットに積んで配線までした状態で機械班が上からヤスリがけをした結果、アルミクズが基板に乗ってショートしました。普通に危ないのでやめていただきたい。
本回路は特に隠すこともないのでデータを公開します。以下のリンクからご覧いただけます。
回路データ(Kicad)
FW(後輩作)
注意
基本的に自由に使っていただいて構いませんがそのままロボコン等での使用や販売をするのはやめてください。データの二次配布は禁止です。詳しくはリンク先のライセンスを確認してください。
モタドラその2
LEDテープ基板

失敗作です。DCDCの選定をミスりました。
調子に乗って25Aまで出せるDCDCを使ったら設計が悪かったのか無負荷状態でも爆熱でヒートシンクがないとまともに触れません。
本番は後輩が即席で改造してくれたので何とか動きました。
また、前述の通り私はESPアンチなので制御用のマイコンもSTM32にしました。その結果、ESPではライブラリを使えば簡単に制御できていたのにSTMだとDMAをゴリゴリに使い倒さないといけなくなりました。
シンプルに失敗作です。制御してくれた1年生の子ごめんなさい。
YamaHexDeviceController
2022年で引退したはずのY君(@yudai0804)作の回路です(?)
この回路1枚でモーター8個、サーボ8個が制御できます。
モーターに対して最大1〜1.5Aの電流を供給でき各モーターの電流値も取得できます。
本来は去年のロボコンで使用するために設計したもので、結局使用しなかった回路でした。しかし今年のルールにちょうどいいことが分かったので急遽使用しました。
実際にロボ2に搭載し、アクチュエータの制御はこれ一枚で完結させました。
お気持ち表明
高専ロボコン4年間について
回路の勉強を始めて3年弱、ようやく一区切りついたと思います。
2022年の秋頃、「来年から電子班やれ」と言われてモータードライバの勉強を始めたのが最初でした。当時はKiCadを開いても何も分からず、FETがなんで熱くなるのかも理解していない状態でした。
それから4年間で設計した基板の枚数を数えたことはないですが、燃やした基板や無駄にした部品の数も相当なものだと思います。失敗のたびに怒られたり呆れられたりしながらも続けられたのは、一緒に作業してくれた後輩たちと、都度助けてくれたY君のおかげです。
卒業後も回路は続けていくつもりですが、ロボコンという舞台での設計はこれが最後になると思うと少し寂しいですね。
今年のロボコンについて
今年は「回路でロボットを動かす」という部分に関してはかなり満足のいく仕上がりになりました。
マザーは設計当初の目標通り多機能に仕上がり、MDも耐久性・安定性ともに歴代で一番良かったと思います。LEDテープ基板は盛大に失敗しましたが、まあそれも経験です。
ロボコン全体としては悔しい部分もありましたが、回路起因のトラブルで動きが止まる場面はほぼなかったのでそこは胸を張れます。
来年以降の後輩たちがこの基板を使いこなして、いい結果を出してくれることを期待しています。