NHK高専ロボコン2023回路
都立産技高専荒川キャンパスロボット研究同好会の田中です。 2023年度の大会も終わって半年が経ったのでもういいかなと思いブログにまとめることにしました。
この記事では作ったモータードライバ(以下MD)とマザーの公開を使用と思います。データはそのうち公開します。
マザー
2023年度の大会は去年までメインの回路と制御だったY君が電子班のメインからいなくなったのでマイコンをSTM32からプログラムを書くのが楽なESP32に変更しました。
制御にPS4コントローラーを使う予定だったのでBluetooth搭載のマイコンにしたかったという理由もあります。
ESP32は壊れやすいということに目を瞑ればCANやUARTなどの通信が充実した使いやすいマイコンだと思います。
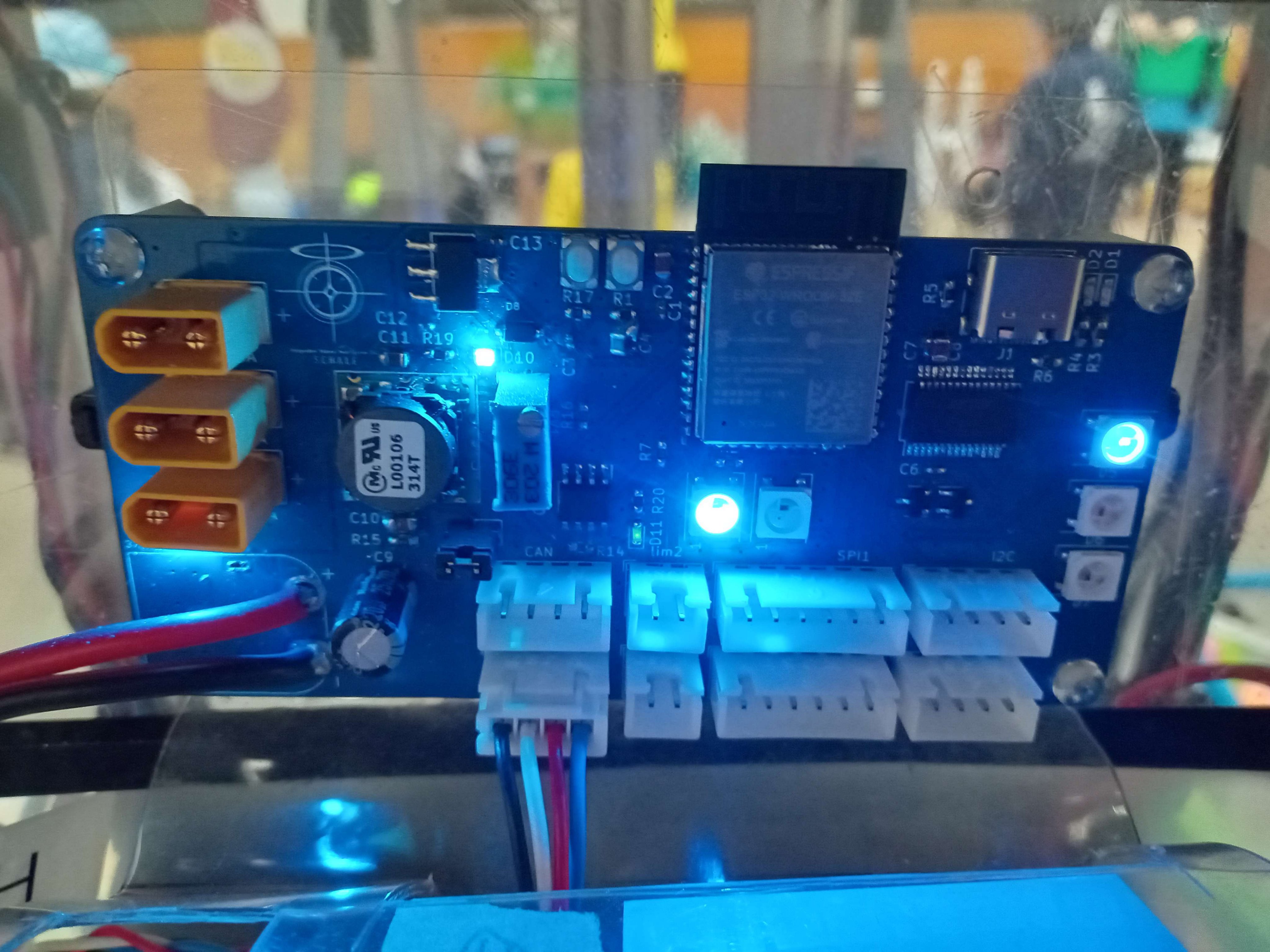
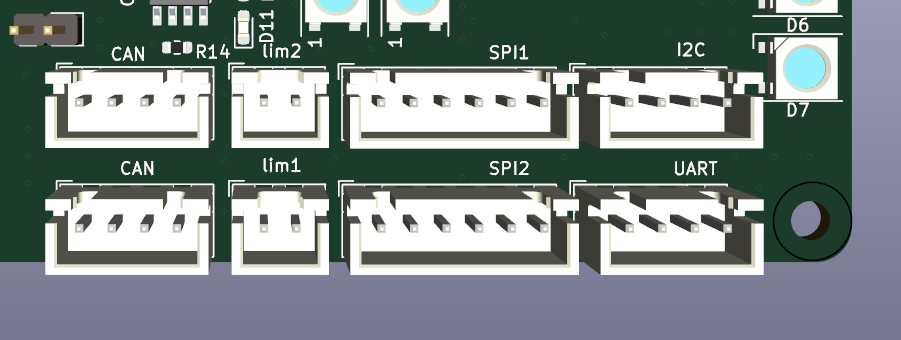
基板からはXHコネクタでCAN,UART,SPI,I2C,リミットスイッチ用の端子がそれぞれ2~1個ずつ出ています。
書き込み用の端子はUSB Type-Cを使いました。
また、2023年度はフィールドが広いのに加えてロボットが走り回るルールだったので遠くからでも回路や通信の状態が確認しやすいように輝度の高いRGBLEDを多数搭載しました。(結局2個くらいしか使わなかった)
電源周りはニッスイ(Ni-MH)かLipo 3sから供給することとしました。
DCDCコンバーターはLED基板などの別回路に電源を渡すことも考えて余裕のある設計にしたかったので秋月で売っている村田製作所のOKL-T/6-W12N-Cを使いました。
(これも結局オーバースペックだった)

マザーは本当になんの変哲もないマイコンボードみたいになりました。通信関連のピンを引き出しているだけです。
モタドラ
ロジック部
MDもSTM32搭載のものしかなかった+去年度の基板の部品がディスコンだったという理由で新しく作りました。(言い訳)
制御+通信用のマイコンとしてマザーと同じようにESP32を積んでいます。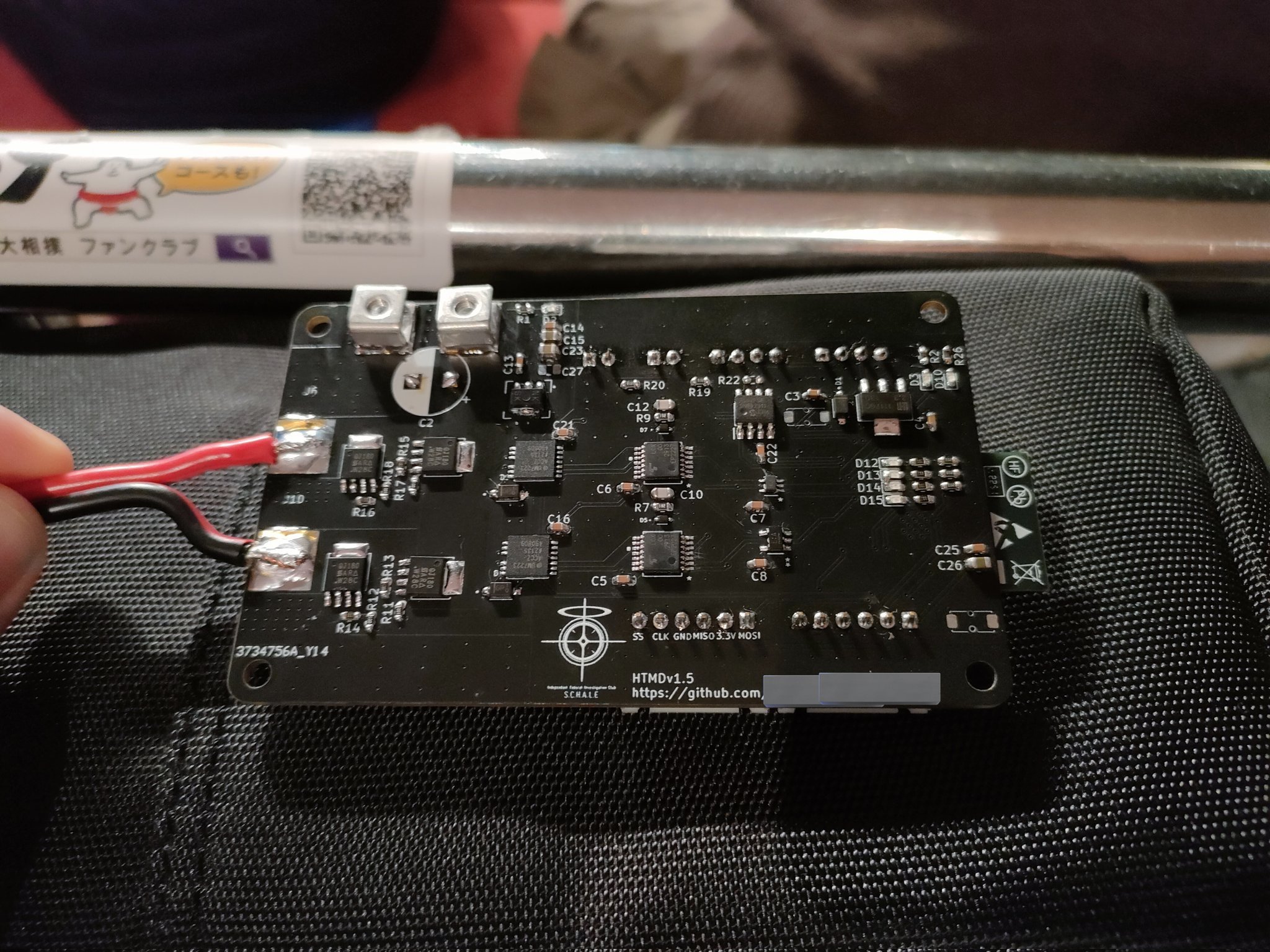
基板間の通信は全てCAN通信で行いました。 端子は全基板XHコネクタだったのですが、Bチームが地区大会で3回も接触不良でロボットが動かなくなっていたので少しひやひやしてました。
駆動部
ゲートドライバにアナログデバイセズ社のADuM7223というを使用しました。このICはゲートドライバとアイソレータの機能が1つのICにまとまっているため省スペース化に非常に役立ちました。
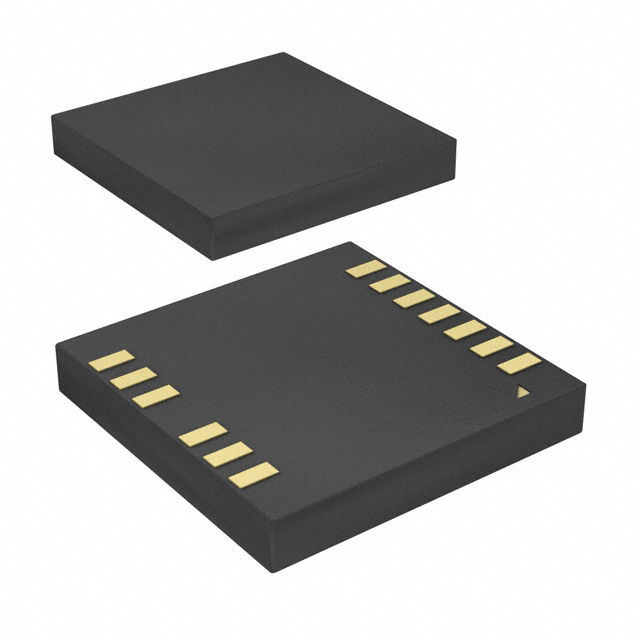
欠点として非常に小さい上にパッドが側面に出ていないため全てリフローではんだ付けをする必要がありました。最初のうちは慣れていなかったため何個か無駄になりました…
また、一つあたり800円近くするため基板の単価が非常に高くなります。類似品にADUM3224というSOICパッケージの姉妹品があるのでそちらを使えばよかったと後悔しました。
FETにはVishayのSQJ180EP-T1_GE3を使いました。
選定理由はシンプルで強かったからです。80Vで248A流せる(らしい)のですが全然普通に燃えました。
このスペックで1個あたり200円と破格のFETだったのですが今はもうどこにも在庫がないので使えないです。
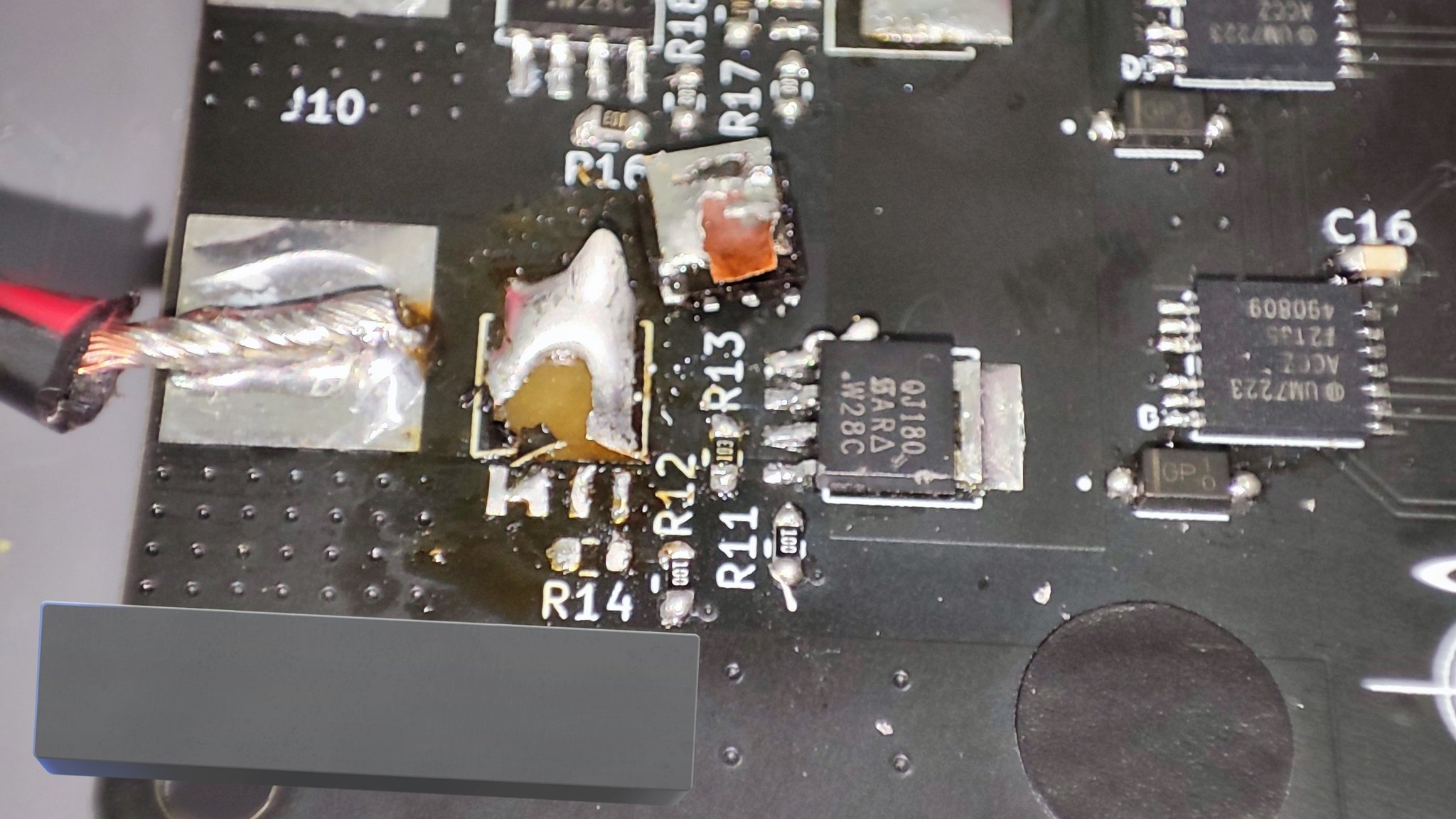
最初はヒートシンクを付けないで使っていましたが本番3日前にMDが3枚燃えたので負荷のかかる足回り用のMDだけ急遽ヒートシンクを付けました。
この時点で予備の基板が4枚ほどだったので焦ってました。結局地区大会はなんのトラブルもなく終わり、その後も1枚だけ故障したものの大きなトラブルはありませんでした。
↓燃えたMD
全体
MDは設置するときに縦積みで設置しました。
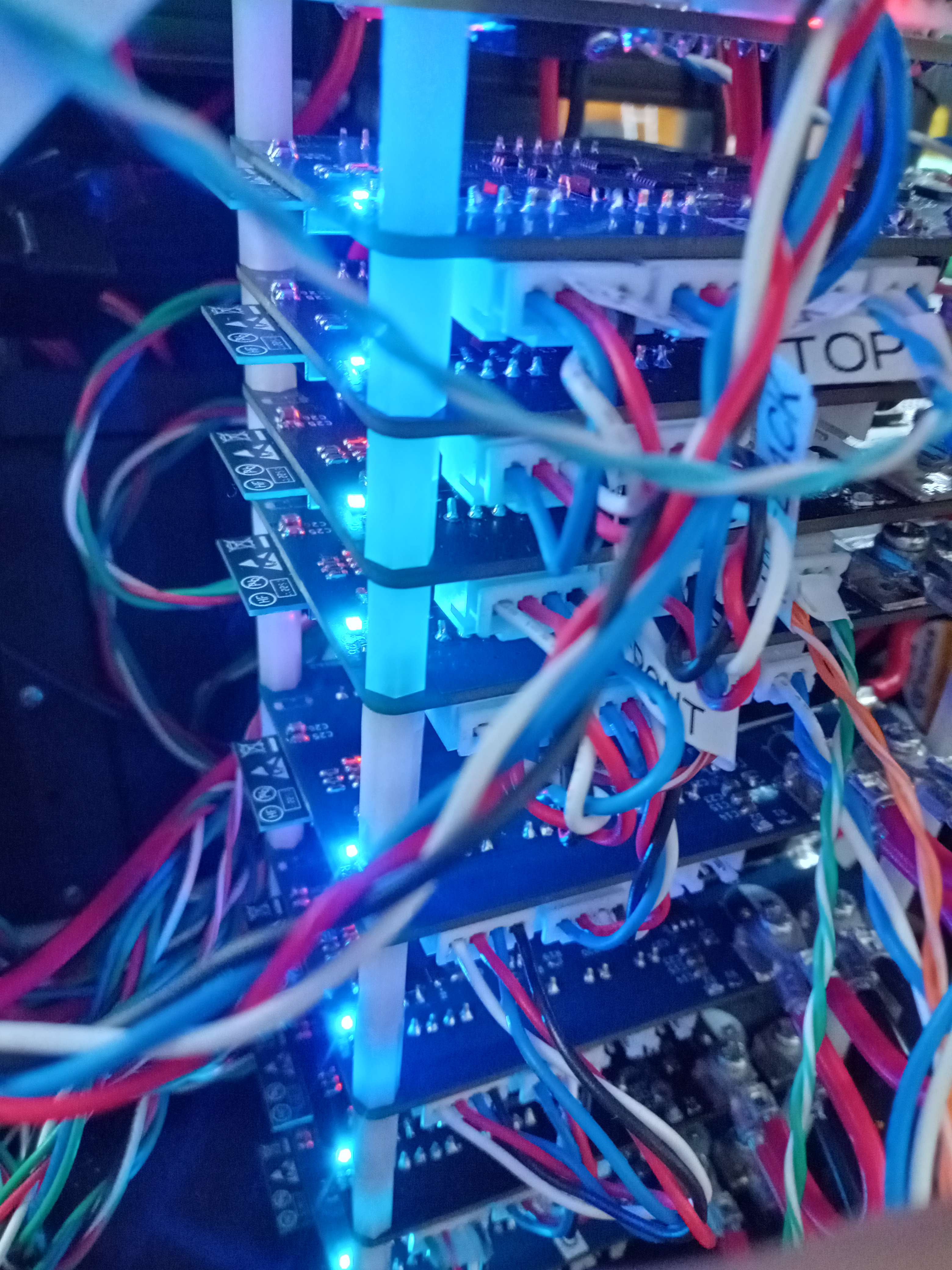 縦積みは省スペースで済む点がメリットです。
縦積みは省スペースで済む点がメリットです。機械班が基板のスペースを確保してくれるか怪しい場合におススメです
デメリットとして、単純に基板を積んでいくだけだと配線が大変です。また、中間にある基板が壊れたときに取り外すのが大変というデメリットもあります。
反省点
①CANのIDセレクタを付けなかった
これが一番大きいです。セレクタがないのでCANのIDをプログラム側でいちいちIDを変えてMDに書き込むという作業が必要でした。制御の後輩には非常に負担をかけてしまいました。
②はんだ付けのことを考えていなかった
先にも書いたように手はんだできない部品を選んでしまったのでリフローする必要がありました。何回か発注をし直したのですが、そのたびにステンシルも発注しなければならず単価が上がりました。
③単価が非常に高くなってしまった
この基板が人生で初めて作った基板だったので何回か発注し直しました。これに加えて高い部品を使ったことでトータルのコストで見たときのMD1枚あたりの単価が1万円近くになってしまいました。
以上が主な反省点です。本当は無限にあるのですが大きいのはこのあたりでした。
お気持ち
私は2022年の11月ごろから本格的に回路の勉強を始めました。
それまでもロボコンには会計などの事務員的なポジションで関わってはいたものの加工をしたり設計をしたりなどの「モノを作る」作業は何もしていませんでした。
大会まで1年ない段階でモータードライバの勉強から始めてよく間に合ったと思います。
もちろん一人でやったわけはなく、後輩とY君の助けがあったからこそだと思います。
この記事が誰かの参考になれば幸いです。